Robotic Sense of Touch Layer
We build the sense of touch for robots.
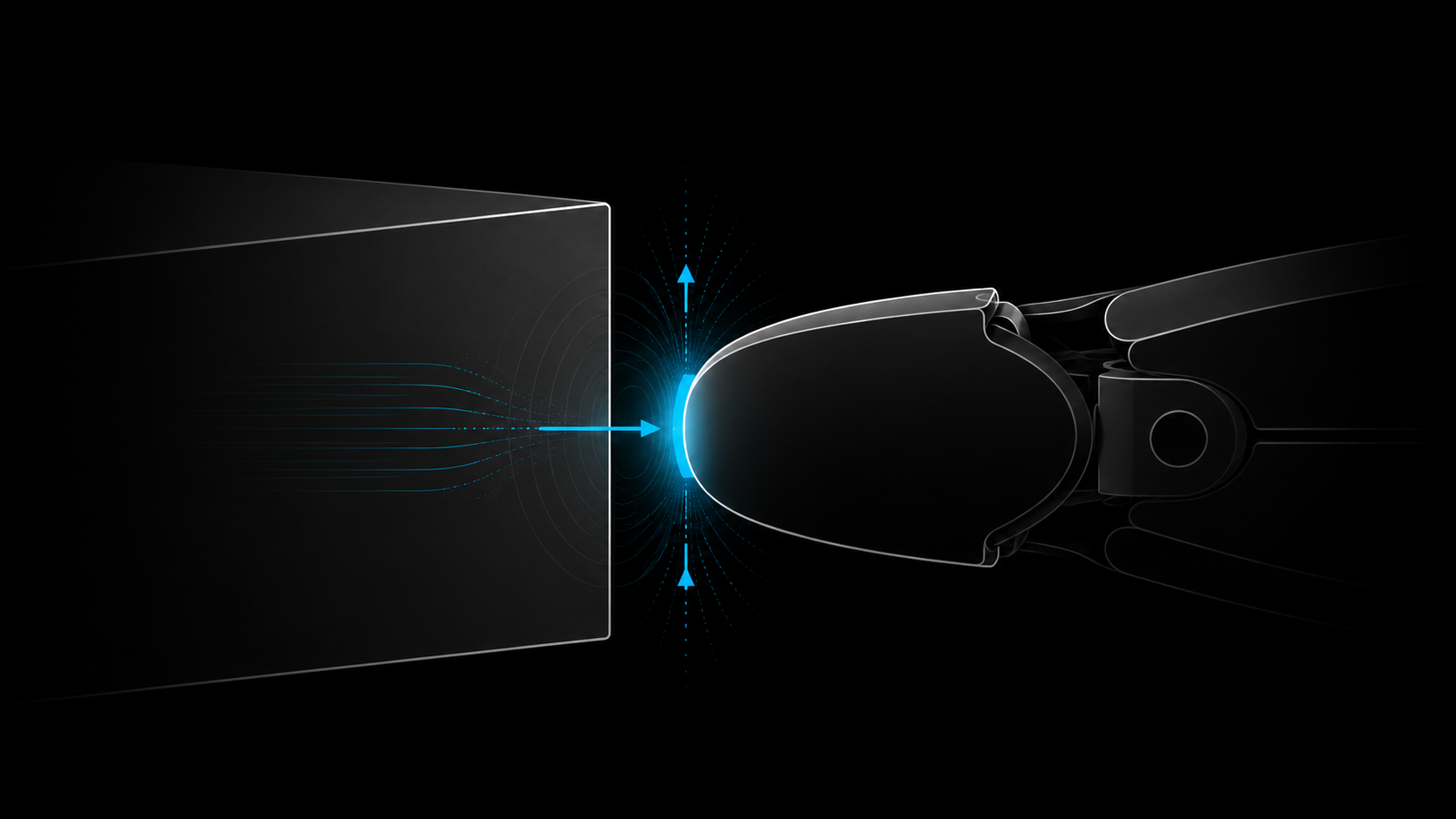
The novel robotics sense of touch layer enables reliable manipulation through real-time measurement of normal and shear forces.
Problem
Robots cannot reliably manipulate objects.
No reliable tactile sensing at the contact point
Normal force measurement breaks in soft, compliant hands
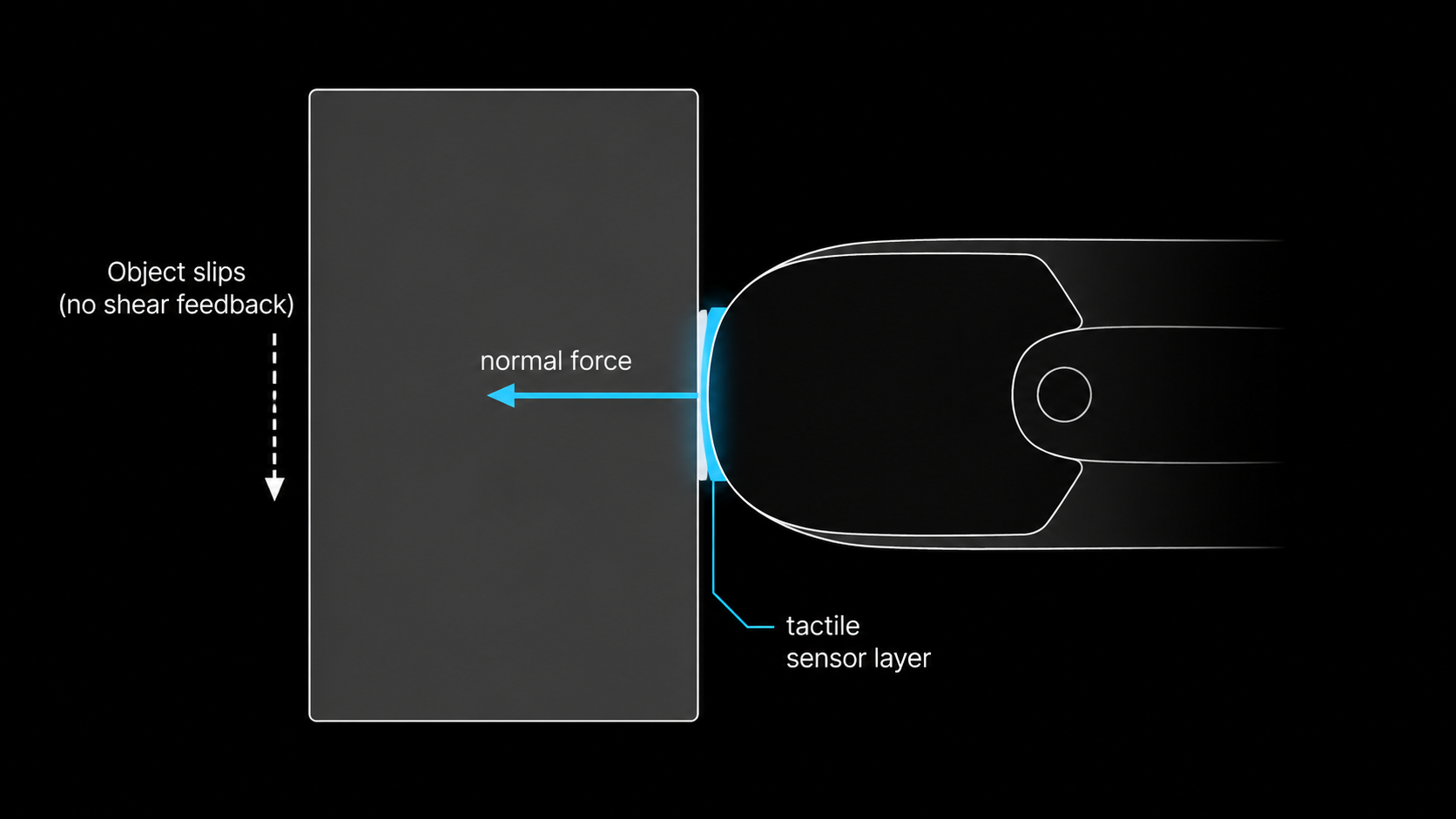
Shear forces are not measured in real systems
Without touch, robots guess.
Without shear feedback
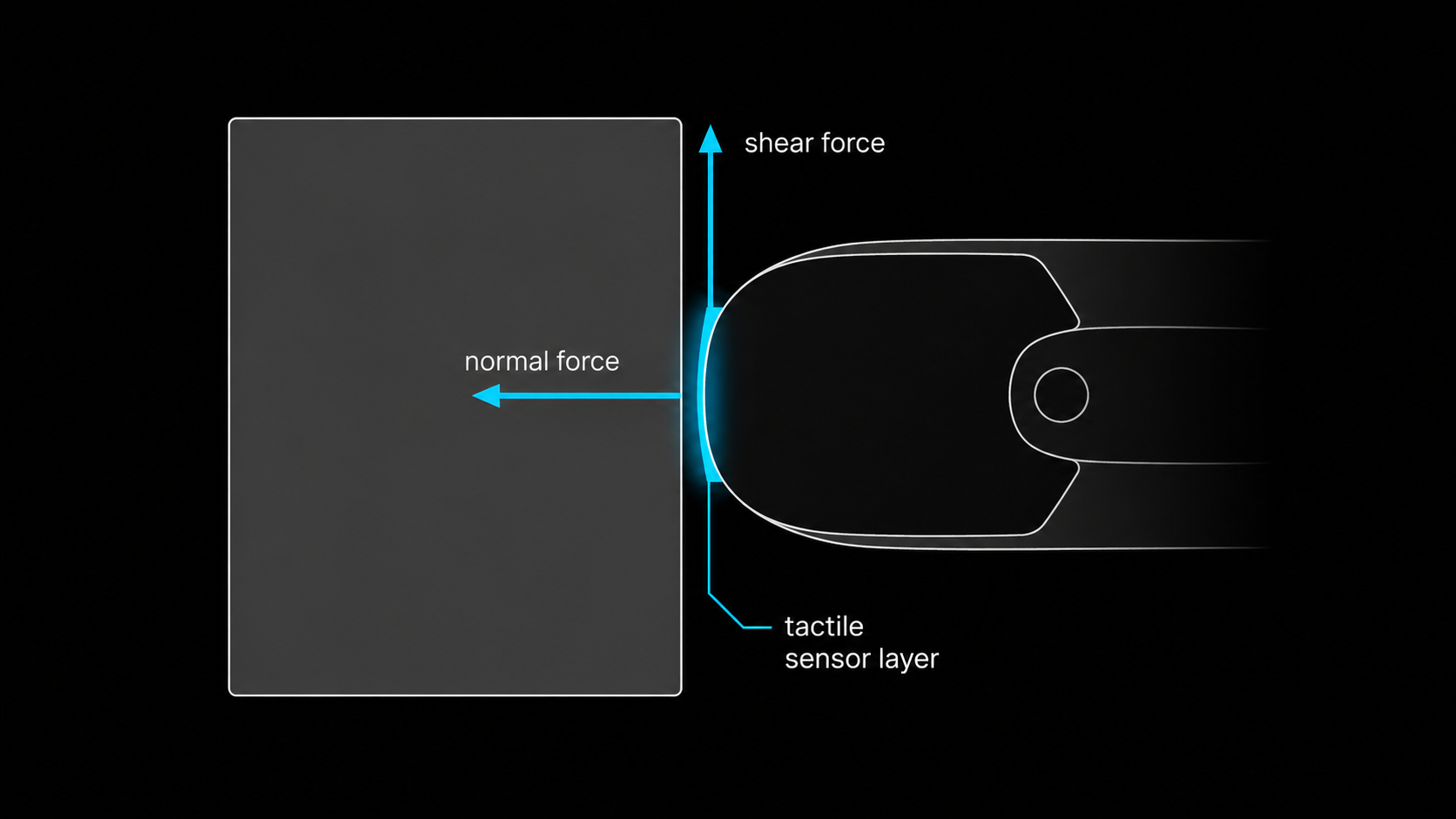
With shear sensing
Solution
The missing layer: Robotic Sense of Touch
We are building a new sensing layer for humanoid robotics.
Normal and shear
Real-time measurement at the point of contact.
Flexible sensors
Thin fingertip layers for compliant hands.
Hand integration
Designed for humanoid robotic platforms.
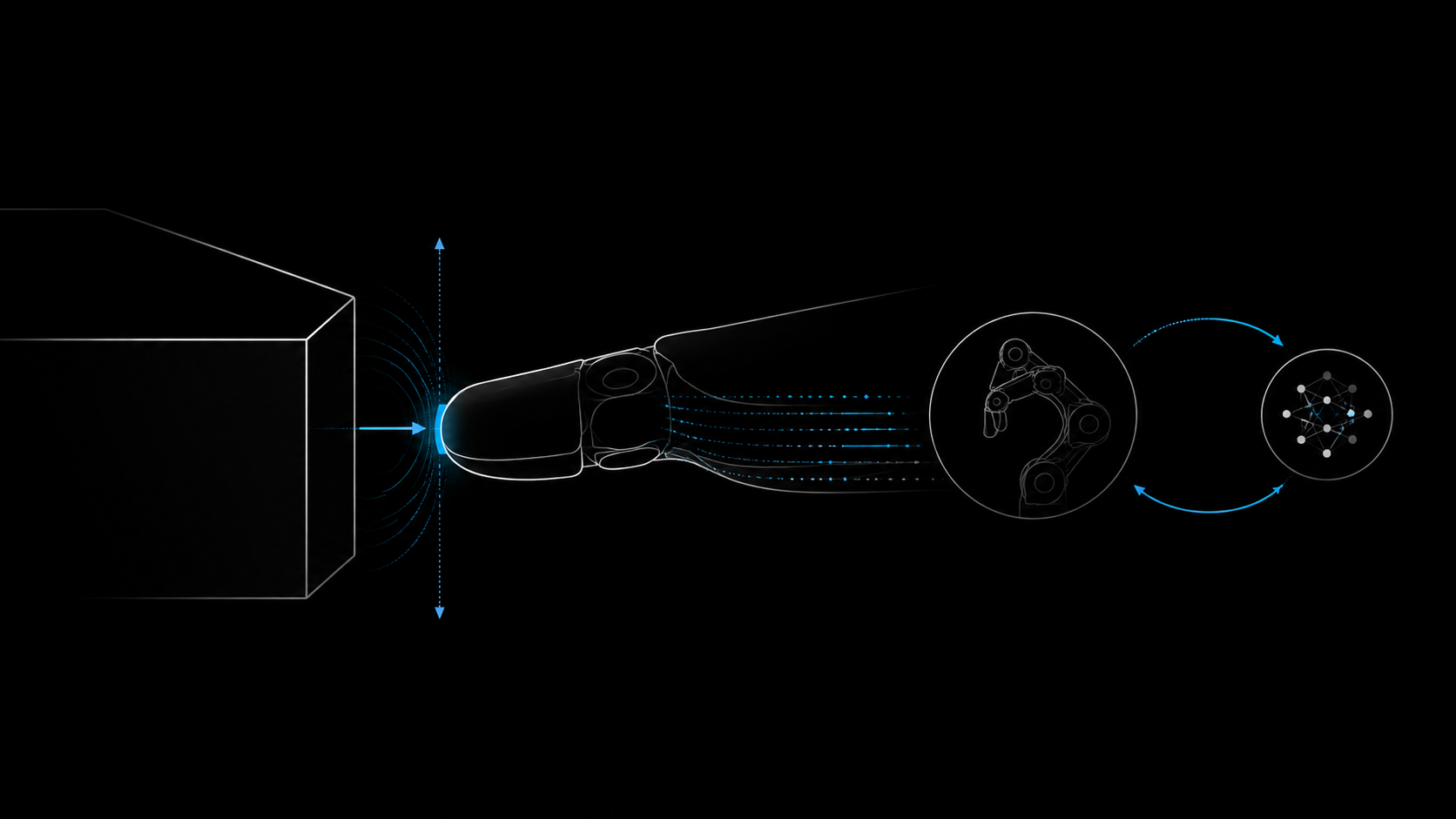
Control SDK
Slip detection and grasp control signals.
From guessing to control.
Why now
Humanoid robotics is scaling. Manipulation is not.
Billions invested in humanoid systems
Actuation and AI improving rapidly
Manipulation remains a core bottleneck
Tactile sensing is the missing piece.
Technology foundation
Built on proven force sensing
The technology is based on decades of force sensing expertise at novel.
Real conditions
Reliable under real-world contact.
High resolution
Pressure measurement where detail matters.
Proven approach
Used where other sensing approaches fail.
Use case: teleoperation
Immediate impact: Teleoperation
Stable gripping
Reduced slip and overgrip
Intuitive control
Performance improvement without AI.
Vision
A standard layer for robotic manipulation
We are building the novel robotics sense of touch layer.
If humanoid robots scale, tactile sensing becomes a standard layer of the stack.
Contact
Work with us
We are looking for robotics partners, integration opportunities, and early customers.